国产芯・多场景,无人车实验的落地引擎
智趣陪伴新体验
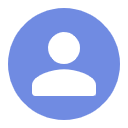
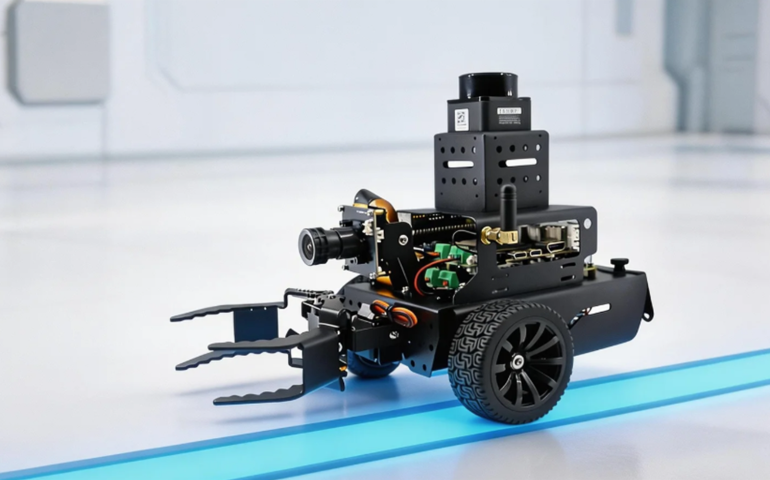
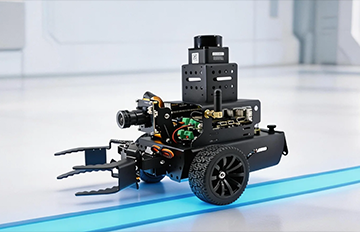
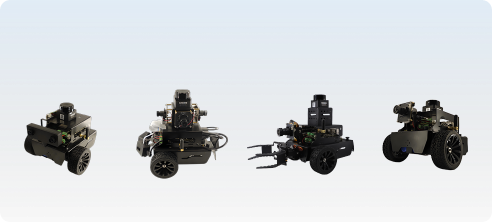
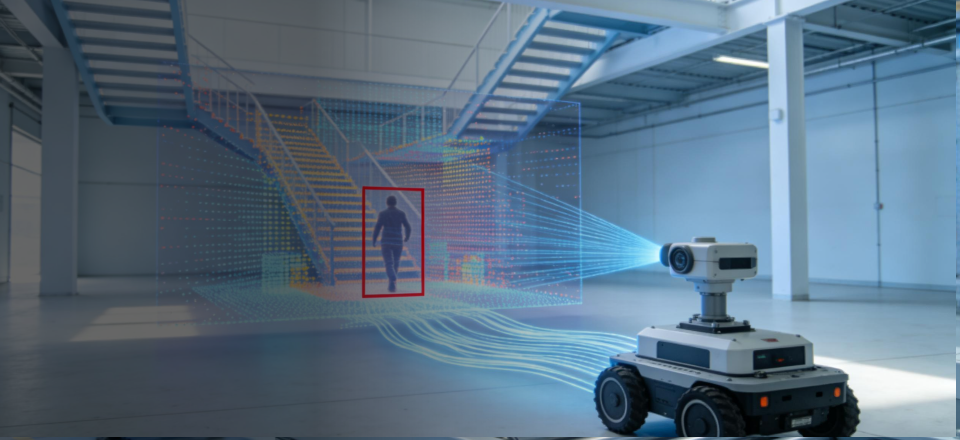
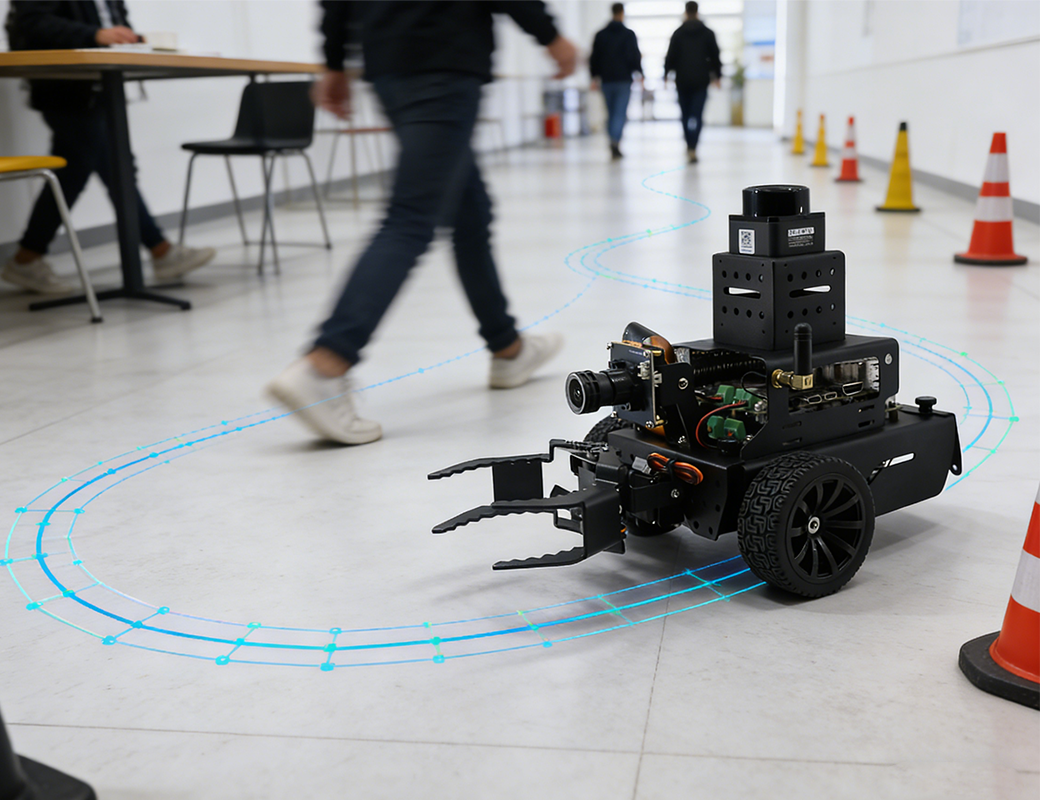
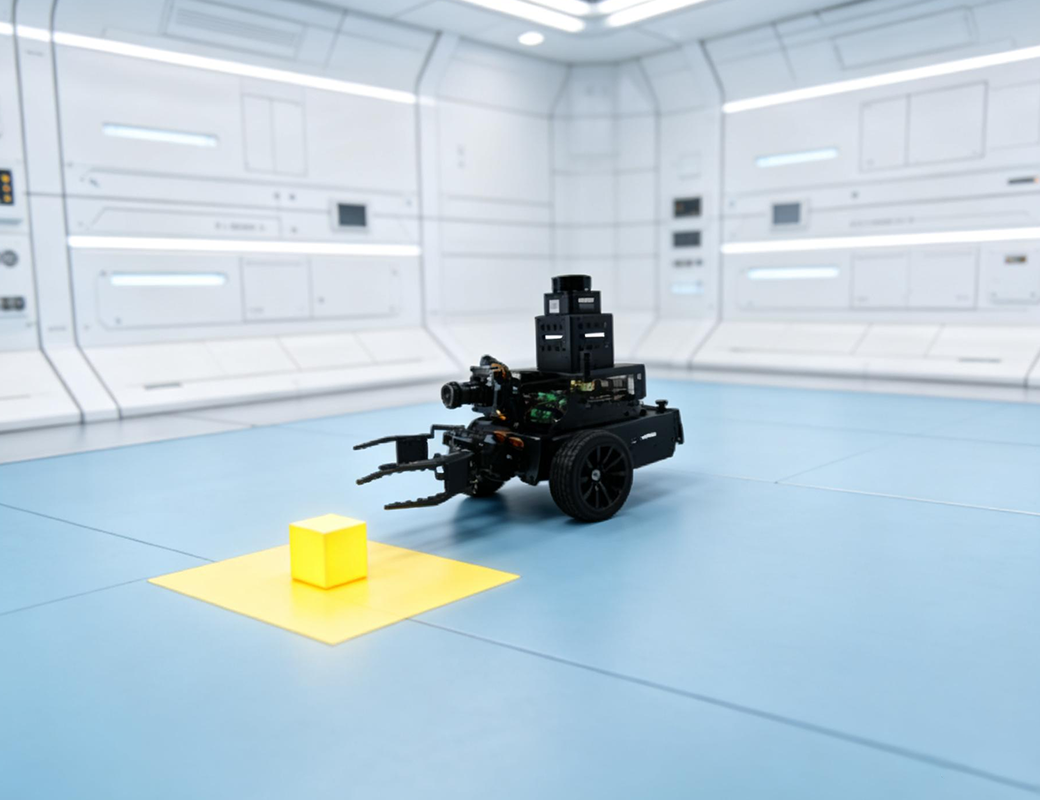
EulerCar上位机搭载Hi3403核心主控,物体分拣场景中,10.4Tops 算力可快速处理多模态传感器采集的物品特征数据,高效完成 AI 目标检测与分类决策,联动机械臂实现动态抓取;视觉巡线场景下,高算力保障摄像头实时捕捉的路径图像能被瞬间解析,快速生成导航指令,支撑复杂环境下的自适应循迹;雷达建图场景中,强大算力可轻松应对激光雷达高速扫描产生的海量点云数据,实现多帧数据融合与 SLAM 算法高效运行,构建高精度二维 / 三维环境地图。正是这一硬核算力,让三大核心实验场景从 “理论方案” 变为 “即开即用的落地场景”,真正覆盖无人车实验的核心需求。
EulerCar上位机搭载Hi3403核心主控,物体分拣场景中,10.4Tops 算力可快速处理多模态传感器采集的物品特征数据,高效完成 AI 目标检测与分类决策,联动机械臂实现动态抓取;视觉巡线场景下,高算力保障摄像头实时捕捉的路径图像能被瞬间解析,快速生成导航指令,支撑复杂环境下的自适应循迹;雷达建图场景中,强大算力可轻松应对激光雷达高速扫描产生的海量点云数据,实现多帧数据融合与 SLAM 算法高效运行,构建高精度二维 / 三维环境地图。正是这一硬核算力,让三大核心实验场景从 “理论方案” 变为 “即开即用的落地场景”,真正覆盖无人车实验的核心需求。<br />